Motivation and Objectives
The operational success of Urban air mobility (UAM), enabled by autonomous electric Vertical Take-Off and Landing (eVTOL) aircraft requires real time safety assurance and complete autonomy. According to a technical report by Uber Elevate, the safety level in air-taxi aviation needs to improve from 1.2 to 0.3 fatalities per 100 million passenger miles through innovation with large amounts of data from real-world operations after the first-generation VTOLs are in production. To achieve that, development of a real-time system-health awareness and state sensing framework is in progress, which can:
- employ time series data from multi-modal sensor network
- be applicable under any admissible operating condition
- perform robustly under atmospheric disturbances and uncertainty
- make decisions in real-time with statistical confidence
- leverage engineering knowledge of the system for increased physical explainability of the data-driven scheme
Online information about system health can facilitate safe landing through mitigating control and save significant down-time for scheduled inspection by enabling Condition Based Maintenance (CBM).
Method of Approach
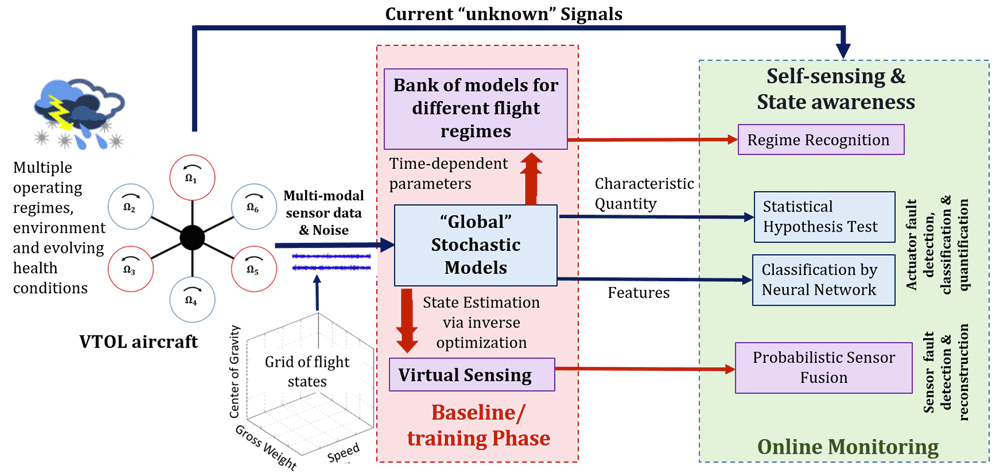
A stochastic framework for health monitoring in multicopters is proposed, whose cornerstone lies in ``global'' stochastic time series models which can appropriately represent the dynamics of the aircraft flight signals under multiple flight states, different fault types and magnitude, changing environmental disturbances and uncertainty via functional pooling of data. The data used are the aircraft states and controller commands time-series data, obtained from a multi-physics multicopter simulation under multiple operating states, turbulence levels and gusts, and different fault scenarios.
The framework has two phases: baseline/ training (offline) phase and inspection (online) phase. In the baseline phase, training data is first acquired under different operational, environmental and health conditions, and the statistical time series representation of the aircraft dynamics is learnt from the training data. From these baseline models, fault-sensitive but robust-to-disturbances characteristic quantities or features are extracted for developing a decision-making scheme to detect and classify faults; through the design of statistical hypotheses tests or training an Machine Learning algorithm. In the inspection or online monitoring phase, current (unknown) flight signals are processed through the developed framework, to acquire information about the current health status of the aircraft. The performance of the developed techniques is studied with a large number of inspection datasets, which are generated with different disturbance realizations than the baseline signals.
Achievements Rotor Fault Detection and Identification by:
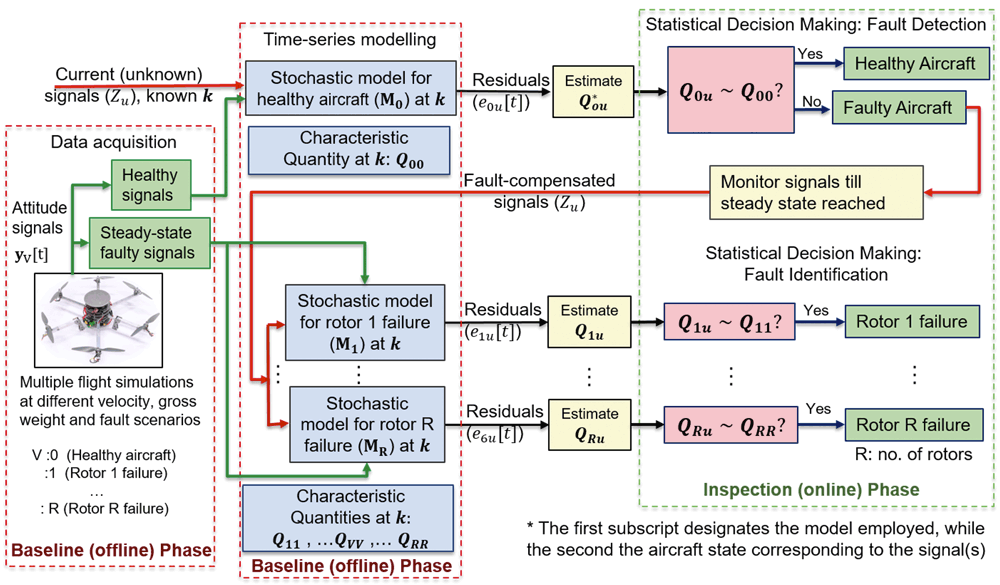
Statistical time series based methods under multiple operating conditions: Stochastic model of the aircraft attitude signal dynamics under multiple velocity and gross weight, for healthy and various rotor failure states, and turbulence and uncertainty was identified. Decision making about the current health was made via statistical hypothesis tests, shown in Fig.1. A major accomplishment of this method was the ability to estimate baseline signal properties for any combination of forward velocity and gross weight with limited baseline data corresponding to a few operating conditions. This method can detect and classify rotor failures with fault compensated signals very accurately ($>95$\%).
Time-series Assisted Neural Network with fault quantification and gust rejection capabilities
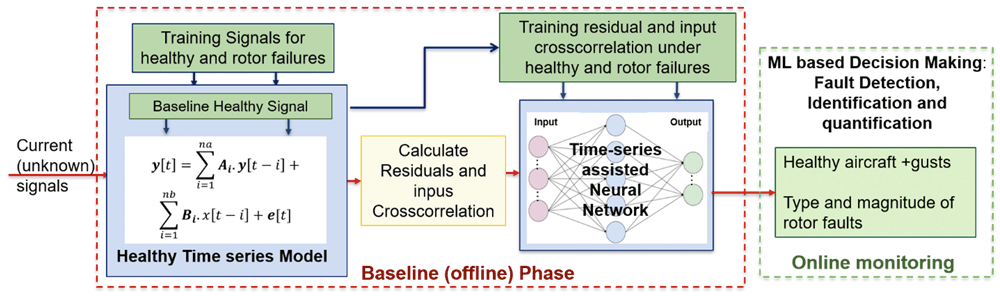
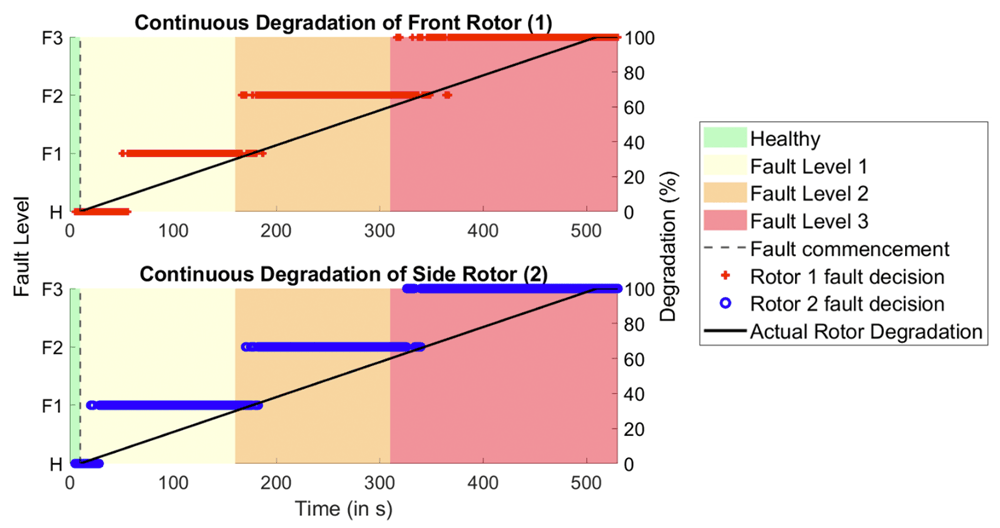
Online real-time rotor FDI, robust in the presence of air turbulence and able to distinguish between aircraft response mimicking rotor faults due to wind gusts and actual rotor degradation, has been achieved. The major feat of this study has been the formulation of a powerful feature that can differentiate between the gust-affected healthy aircraft dynamics and rotor degradation dynamics even after it is compensated by the controller. This feature, the cross-correlation between signal residuals obtained via a statistical model of a healthy aircraft is used as input to a single hidden layer neural network, resulting in fast rotor FDI with accuracy of $> 97$\%. The general work frame and an indicative continuous rotor fault monitoring result has been shown in Fig.3 and 4 respectively.
Tasks in pipeline
- Fault Quantification: via an unified statistical framework with stochastic models for different fault types whose parameters depend functionally on the fault magnitude by inverse optimization techniques. In this study, the capability of precise fault quantification by the "local" (sensors on rotor booms) and "global" sensors will be studied.
- Incorporation of structural properties of the hexacopter: An advanced physics-based model of the hexacopter that incorporates the flexibility of the rotor booms will be used for data generation and analysis. Along with aircraft states and controller effort, strain-gauges or load sensors reading on the boom can also be obtained. Sensor selection for rotor FDI with respect to the information contained in each sensor data with regard to the type and magnitude of fault will be analysed through the Fisher Information Matrix.
- Experimental validation: Run flight tests on a small-scale quadcopter by degrading its rotors one by one and collect data to experimentally validate the effectiveness and performance of the developed rotor FDI techniques.
- Expansion of the stochastic framework for multiple flight regimes: The stochastic model identification and subsequent FDI will be expanded from under steady cruise only to different flight regimes, with data generated via healthy as well as faulty hexacopter simulation under loiter, climb and descent of the hexacopter. This bank of models will aid in regime recognition along with FDI under complex dynamic environments.
- Virtual Sensing: To develop a stochastic “global” identification approach based on functionally pooled time series models to account for a range of operating conditions such as forward velocity, gross weight, center of gravity, etc. This model employed for flight state estimation via inverse optimization techniques can enable virtual sensing with flight data only and facilitate prospective redundancy augmentation of the sensor network through sensor fusion.
- Verification of the statistical properties: To formally verify whether the data-driven probabilistic guarantees hold in real-time, it is required to verify the extent to which the accuracy and robustness of stochastic FDI framework depend on a data-driven model of the system and their parameters, quality and noise content of the signals used to identify them and thereby, quantify the certainty of state estimation based on the variances determined by the Cramér-Rao lower bound.