Objective
Active sensing acousto-ultrasound guided-wave based SHM techniques have shown great promise due to their potential sensitivity to small damages. However, the methods' robustness and diagnosis capability become limited in the presence of environmental and operational variability such as change in surrounding temperature, different load and boundary conditions, variation in material properties, etc. In addition, the currently used techniques rely on deterministic damage diagnosis schemes, rather than probabilistic frameworks which can account for uncertainty arising from different sources. As such, it is critical to model guided wave propagation in the presence of varying external sources, environments, operating conditions, and material property variations that impose uncertainty on guided wave propagation.
Motivation
The motivation for my study is to model guided wave propagation under uncertainty in order to develop a robust SHM system and impart intelligence and awareness in smart structures. In order to do so, we have harnessed stochastic time series models, advanced statistics, stochastic signals and systems theory and more recently, machine learning or statistical learning tools such as gaussian process regression models.
We have investigated two types of systems.
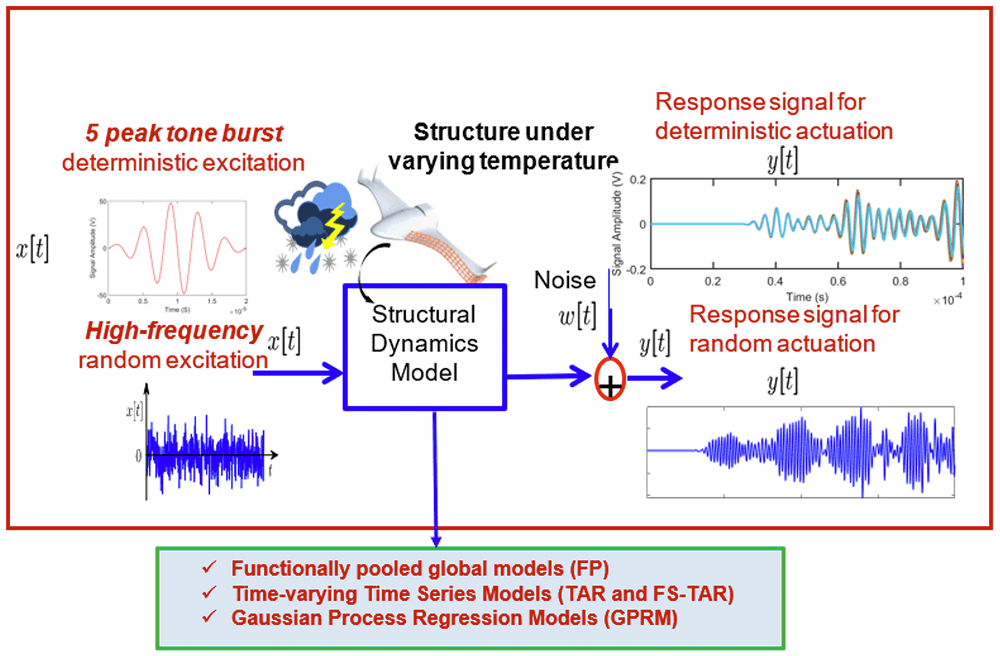
- Systems excited by narrow-band tone burst deterministic actuation
- Systems excited by broadband high-frequency random actuation
Contributions
- Identification of Guided wave propagation under temperature variation
- Identification of Guided wave propagation under random actuation
- Surrogate modeling of guided wave propagation under uncertainty
Method of Approach
In order to generate data, we performed both experiments and finite-element modeling. We used deterministic tone-burst actuation as well as random gaussian white noise actuation for generating guided waves in thin aluminum plates subjected to different temperatures and loads. We then identified the system and modeled guided wave propagation using stochastic time-varying time series models and functionally pooled global models.